



Segunda parte del artículo técnico escrito por Florian Bousquet, responsable de desarrollo de mercado de la compañía u-blox sobre cómo mejorar los sistemas de navegación por satélite en vehículos utilizando UDR Untethered Dead Reckoning.
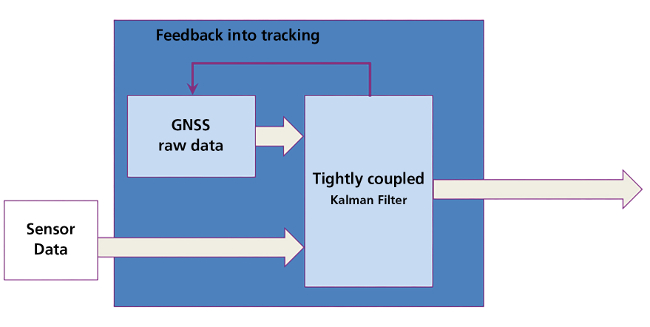
El enfoque totalmente integrado de un módulo UDR, como el NEO-M8U, ayuda a lograr la mejor precisión de posición. La Figura 4 ilustra el diseño del M8, que usa un filtro de Kalman acoplado para respaldar la precisión en la información de localización del módulo GNSS. El filtro de Kalman, también conocido como un algoritmo de estimador lineal-cuadrático, sirve para calcular la ubicación del vehículo en función de una serie de medidas y aporta una estimación más precisa que si sólo se confía en una única medición de posición. De esta forma y teniendo el potencial de comprobar cada señal GNSS y de sensor de un modo diferente se garantiza la máxima precisión 3D. Cuando se circula en “cañones urbanos”, la incorporación de datos de uno o dos satélites contribuye a aumentar la precisión de la posición UDR Untethered Dead Reckoning con respecto a otros enfoques, que conllevarían una disminución de precisión o la pérdida de la posición.
Otra ventaja importante del enfoque de UDR se encuentra en su capacidad para proporcionar una elevado ratio de refresco (Refresh Rate) de los datos de posición o una salida de alta ratio de navegación (High Navigation Rate – HNR) en tiempo real. Si sólo se depende de señales GNSS, se produce una latencia inherente en el cálculo de la posición. Usando los sistemas GNSS disponibles en el mercado, se consigue un máximo de 10 composiciones por segundo y una ratio de refresco de 10 Hz. Esto permitiría reflejar la posición del vehículo cuando se adquieren los datos del satélite. UDR puede doblar la ratio de refresco (hasta 20 Hz), ayudando así a mejorar significativamente la navegación.
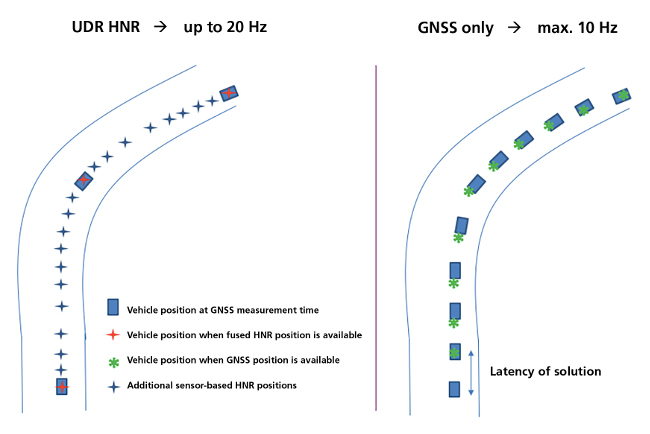
La Figura 5 muestra el impacto de la latencia en la navegación en soluciones con solo GNSS y con UDR (con datos de sensor para complementar los recibidos de GNSS). Al conseguir una latencia de unos pocos milisegundos, se responde a las necesidades de aplicaciones de seguridad como sistemas anticolisión basados en infraestructura V2X y la posición de los vehículos. La baja latencia y el elevado ratio de navegación son requisitos fundamentales en aplicaciones V2X, ya que garantizan la capacidad de reacción demandada en caso de alerta.
Componentes para el sistema UDR Untethered Dead Reckoning
Los módulos NEO-M8U y EVA-M8E del fabricante u-blox se benefician del flujo de datos proveniente del giroscopio de tres ejes, del acelerómetro de tres ejes y del sensor de temperatura (con una ratio de 100 Hz). Esta información se encuentra disponible a través de la interfaz UART o I2C compatible y podría utilizarse a la hora de trazar un perfil del comportamiento del conductor (en servicios de seguros pay-as-you-drive – pague como conduzca) o reconstruir accidentes.
Cuando se contempla embarcarse en un diseño basado en UDR, los ingenieros de electrónica de automoción tienen que sondear las capacidades de un módulo UDR y las herramientas de desarrollo que podrían ayudar en el proceso de prototipado y, por lo tanto, acortar el tiempo de llegada al mercado. Las principales consideraciones incluyen el rango de temperatura operativa, la certificación por parte de los estándares de calidad del sector de la automoción, como AEC-Q100 y la conformidad con estándares como ISO 16750, que estipulan los extremos de las condiciones que probablemente se encontrará un vehículo en la carretera. Para poder ofrecer soporte en el prototipado inicial, se necesitará un kit de evaluación o diseño de referencia que permita ensayar, por ejemplo, con diferentes posiciones de antena, evaluar distintas funcionalidades de módulo y visualizar el rendimiento de GNSS y los sensores.
UDR Untethered Dead Reckoning dota de un nivel de navegación a bordo del vehículo que no era posible hasta el momento. Aunque se atraviesen túneles o zonas urbanas con multitud de edificios altos o se estacione en aparcamientos de varias plantas, UDR proporciona una navegación continua sin necesidad de unirse a la red del propio coche y mantiene la precisión incluso después de periodos cortos de pérdida de señal.








{kind=link}